Security research project funded by the Czech Ministry of the Interior to develop autonomous robotic and aerial systems for reduced response times and enhanced protection of critical infrastructure.
Operators of industrial and infrastructure facilities typically rely on static cameras and human patrols. While these tools are well established, they often provide limited coverage and slow reaction times. Reaching an incident location can take tens of minutes, and operators frequently lack reliable information about what is actually happening on site.
ASCIP project responds to this challenge by introducing mobile robotic systems that can be deployed immediately. Autonomous ground robots and drones are able to reach the scene within minutes and provide real-time visual and thermal information, giving operators early situational awareness and supporting safer decision-making.
Objectives
The main objective of ASCIP is to verify how cyber-physical systems can improve the protection of critical infrastructure by accelerating incident response and reducing the need for routine physical patrols.
In practice, the project aims to (1) enable continuous autonomous monitoring of large outdoor and semi-indoor areas, (2) support rapid inspection of incidents using ground robots and drones, (3) ensure reliable operation without GNSS and under low-visibility conditions, and (4) integrate data from multiple robotic platforms and sensors into a single operator view.
Sollution approach
ASCIP combines autonomous ground robots, unmanned aerial vehicles (UAVs), and an integrated supervisory system into one coherent solution. Ground robots perform regular inspection patrols and can be dispatched directly to an incident location. Drones provide fast aerial overview and thermal sensing, supported by autonomous docking stations that allow quick battery replacement and repeated deployment.
All data from robots, drones, cameras, and other sensors are collected in a unified supervisory interface. This gives operators a clear overview of the situation in real time and supports predefined operational procedures during security or operational incidents.

Validation and relevance
The technologies developed in ASCIP are validated in both experimental environments and real operational facilities of Czech critical infrastructure operators. Testing focuses on realistic conditions such as GNSS-denied environments, night operation, reduced visibility, and changing weather.
The results show that autonomous robotic monitoring can significantly shorten response times, improve situational awareness, and increase the safety of intervention teams. Beyond industrial security, the approach is also relevant for crisis management scenarios such as industrial accidents, natural disasters, or other emergency situations.
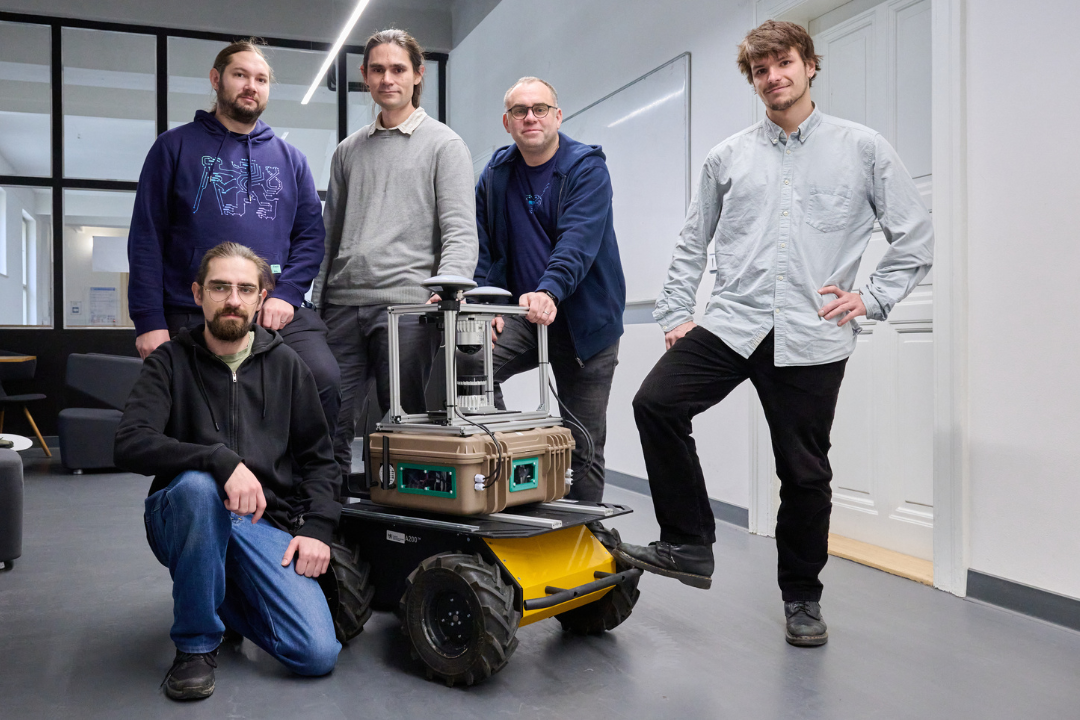
Consortium
ASCIP is implemented by a multidisciplinary consortium combining academic research, industrial development, and security system integration:
- AgentFly Technologies – project coordinator; UAV platforms and autonomous docking stations
- Czech Technical University in Prague – autonomous ground robotics and research leadership in computational robotics (see ComRobLab website)
- Z.L.D. – integrated supervisory and security software environment
- Sherlog NG – security technologies and applied expertise
- Faculty of Social Sciences, Charles University – societal and organizational aspects of security
Project info
Supported by: Ministry of the Interior of the Czech Republic
Program: Open Challenges in Security Research 2023–2029
Project duration: 2023–2025
Project ID: VK01030216
.png)