Autonomous mobile robots can carry out tasks in environments that are unsafe or otherwise unsuitable for humans. The robots' missions in such environments range from remote facilities inspections to searching for survivors in the collapsed buildings or caves. Our models were also deployed on a tracked robot during the DARPA Subterranean Challenge.
In this video, you can see the developed environment models being deployed on a tracked robot during the DARPA Subterranean Challenge - a joint work within CTU-CRAS-NORLAB Team.
Although the loss of a robot searching in a collapsed building may be more acceptable than risking a human rescue team, the robots ultimately face the same risks as humans. The robots therefore have to reason how to navigate around various hazards. We develop terrain learnable models and algorithms for predicting the environment traversability using the robots’ experience with the terrain as a combination of exteroceptive and proprioceptive sensing.
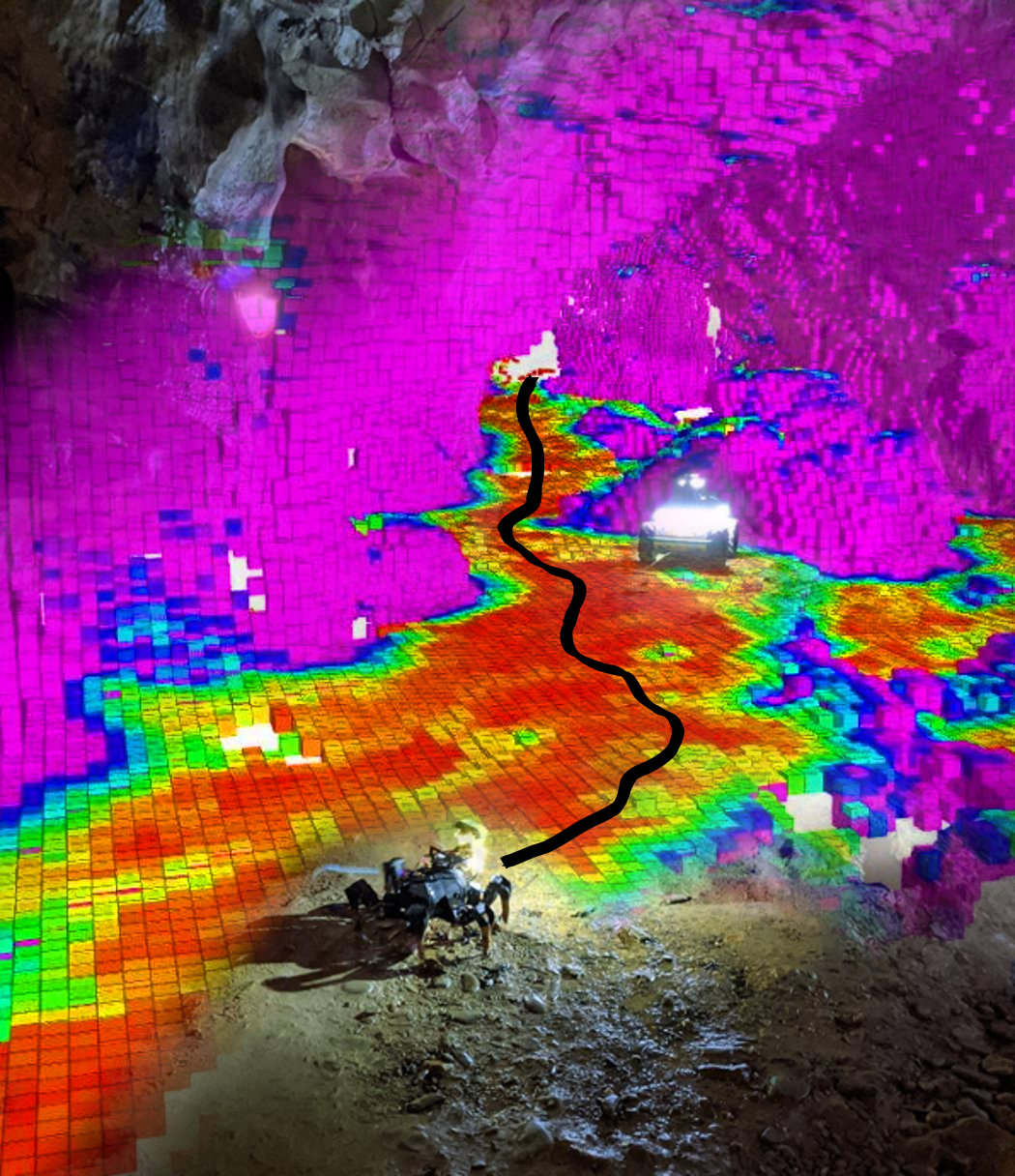
For environments that are at least to some extent unknown, the robots actively build their environment models as a part of their mission. Mobile robots explore and map the environment by seeking previously unseen areas. We deploy our robots in complex environments where some terrains are not rigid and hence can slow down the robot or outright crumble under its weight. In these situations, observing such terrains is not sufficient to determine their traversability. Our robots actively seek unknown terrains and then use the experience gained by traversing them to predict the properties of similarly appearing areas.

Communication is crucial for coordination and efficient multi-robot teaming and also in missions where status of the robots need to be shared and communicated to the base. In buildings and underground environments, the propagation of wireless signals is affected by phenomena which are typically too complex to be modelled directly. Therefore, we are working on novel learning approaches for building communication maps to efficiently predict the signal strength in communication-constrained environments.

The research results are based on the research supported under the research projects:
- DARPA Subterranean Challenge - Phase 3, Defense Advanced Research Projects Agency (DARPA), agreement No. HR00112190014 (2020-2021)
- Multi-Robot Persistent Monitoring of Dynamic Environments, Czech Science Foundation (GA ČR) project No. GA19-20238S (2019-2021)
- Robotic Lifelong Learning of Multi-legged Robot Locomotion Control in Autonomous Data Collection Missions, Czech Science Foundation (GA ČR) project No. GA18-18858S (2018-2020)
- Adaptive Informative Path Planning in Autonomous Data Collection in Dynamic Unstructured Environments, Czech Science Foundation (GA ČR), project No. 15-09600Y (2015-2017)
- Visual Navigation for Hexapod Walking Robots in Autonomous Data Collection Tasks, a joint project with the University of Buenos Aires, Ministry of Education Youth and Sports (MEYS) project No. 7AMB15AR029 (2015-2016)